首页
研究方向
类生命机器人研究
微纳米机器人研究
微纳光学与生物操控
微纳检测及操控
外骨骼机器人技术
研究队伍
研究员
客座教授
研究骨干
在读研究生
毕业研究生
科研成果
期刊论文
会议论文
获奖
封面文章
视频图片
研究视频
活动资料
媒体报道
仪器设备
微纳操控平台
生物实验平台
分析测试平台
其他平台
联系我们
内部网络
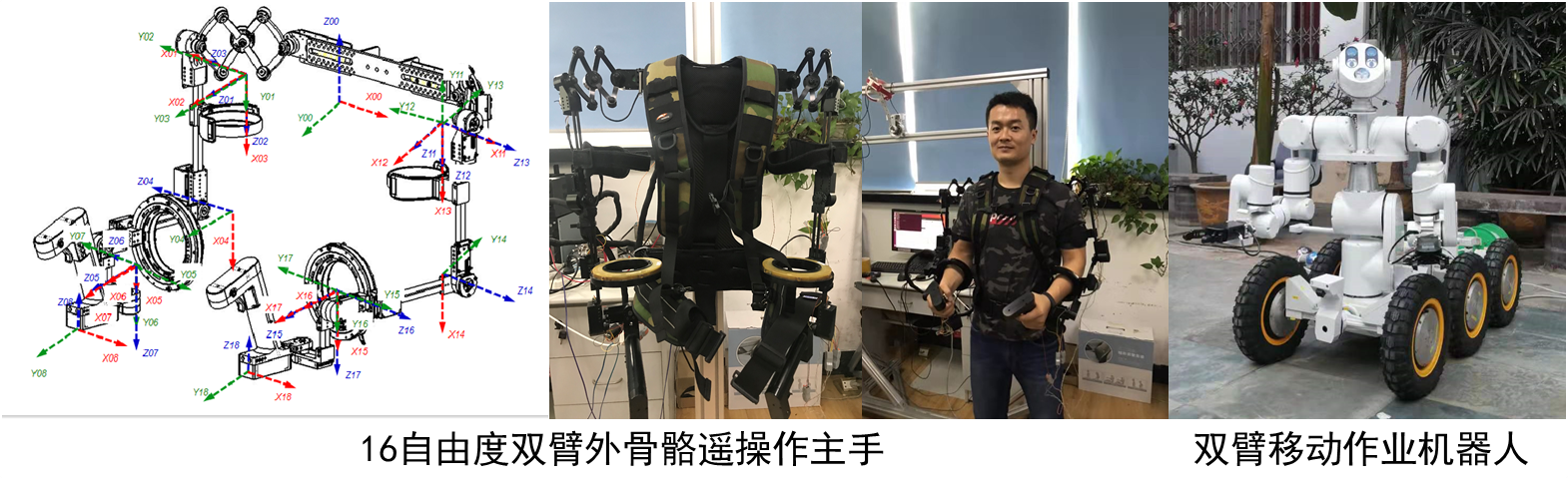
外骨骼机器人技术
研究可穿戴外骨骼机器人及主从遥操作机器人系统,包括低惯量、高刚度仿生外骨骼机器人与类人型双臂机器人技术、新型双向多模态人机交互感知技术等,提升人机交互的本质安全性与临场感,探索其在医疗康复、深海探索、灾难救援等领域的应用。
关注微信公众号
关注微信公众号


 关注微信公众号
关注微信公众号