R.O.C.O.S
中国科学院沈阳自动化研究所 | 机器人学研究室
智能操作方向组
我们来自中国科学院沈阳自动化研究所机器人学研究室(机器人学国家重点实验室),团队主要关注机器人前沿技术,期望让机器人拥有媲美人类的灵巧操作能力。
中国科学院沈阳自动化研究所 | 机器人学研究室
我们来自中国科学院沈阳自动化研究所机器人学研究室(机器人学国家重点实验室),团队主要关注机器人前沿技术,期望让机器人拥有媲美人类的灵巧操作能力。
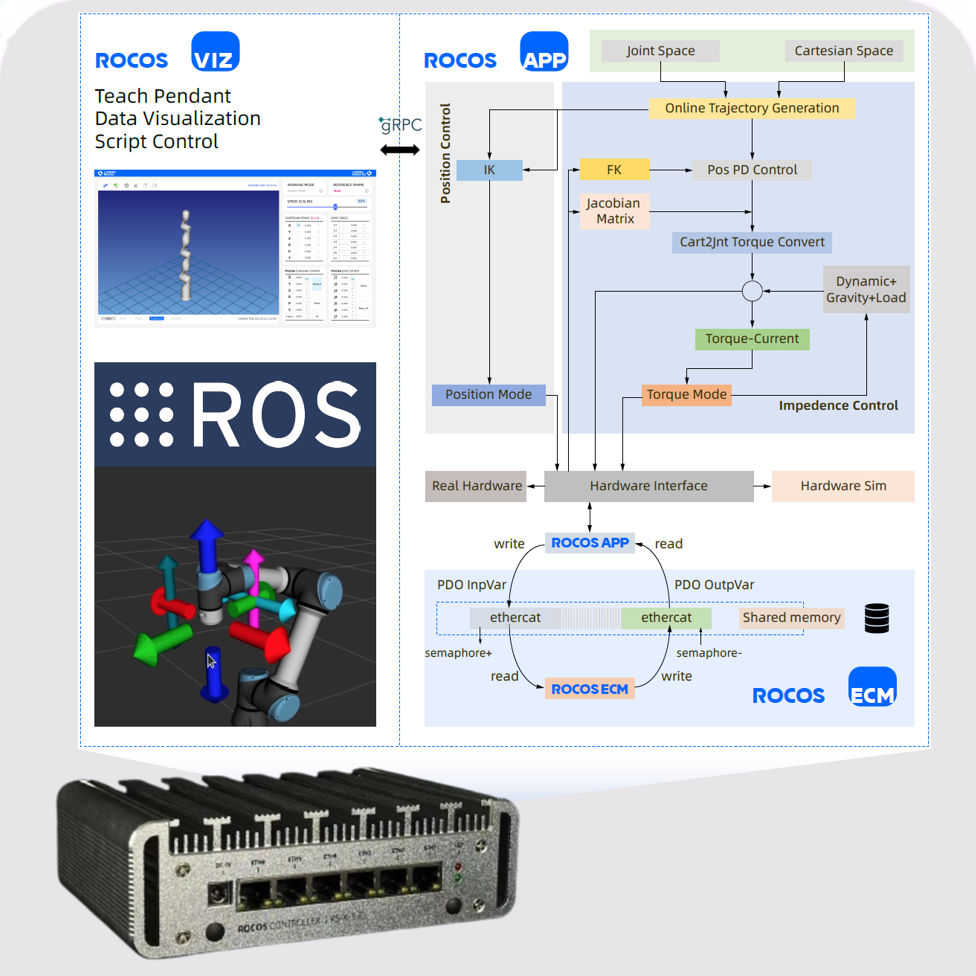
聚焦于复杂机器人系统集成、软硬件一体化设计,构建面向工业、医疗和服务等多领域的机器人整体解决方案。实现复杂作业任务中多部件、高精度、高可靠性的系统协同,为机器人灵巧操作提供坚实的工程基础。
专注于机器人高带宽伺服运动控制,在线轨迹规划,机器人运动学与动力学,柔顺运动控制,实现机器人高精度与柔顺兼备的操作能力,提升机器人在高动态任务和人机协同过程中的运动稳定性与安全性。
使机器人具备类人认知和自主操作能力,推动机器人从“能动”到“能干”。重点研究基于模仿学习、强化学习和多模态感知的操作技能建模与迁移机制,构建多任务共享的技能库与自适应策略生成模型,赋予机器人在非结构环境中自主获取、泛化与优化操作能力。

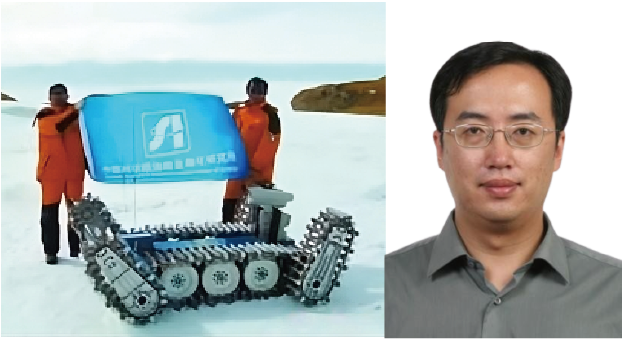
工学博士,中国科学院特聘核心研究员,博导,辽宁“百千万人才工程”千人层次,中国自动化学会技术发明一等奖,国家自然基金重大计划重点项目负责人,国家重点研发计划课题负责人,承担国家级课题10余项,发表SCI/EI高水平学术论文70余篇。长期从事机器人智能控制、感知交互等基础问题和关键技术研究,开展特种作业机器人、工业协作机械臂、医疗手术机器人等应用系统的关键技术攻关和装备研制工作。

工学博士,中国科学院特聘研究员,博导,辽宁省杰青,主持多个国家级课题。长期从事医疗手术机器人相关研究

工学硕士,长期从事复杂传动机构设计,机构型综合,机构有限元分析

工学博士,研究方向为机器人运动控制、灵巧操作,技能学习
我们的技术栈人员分布: