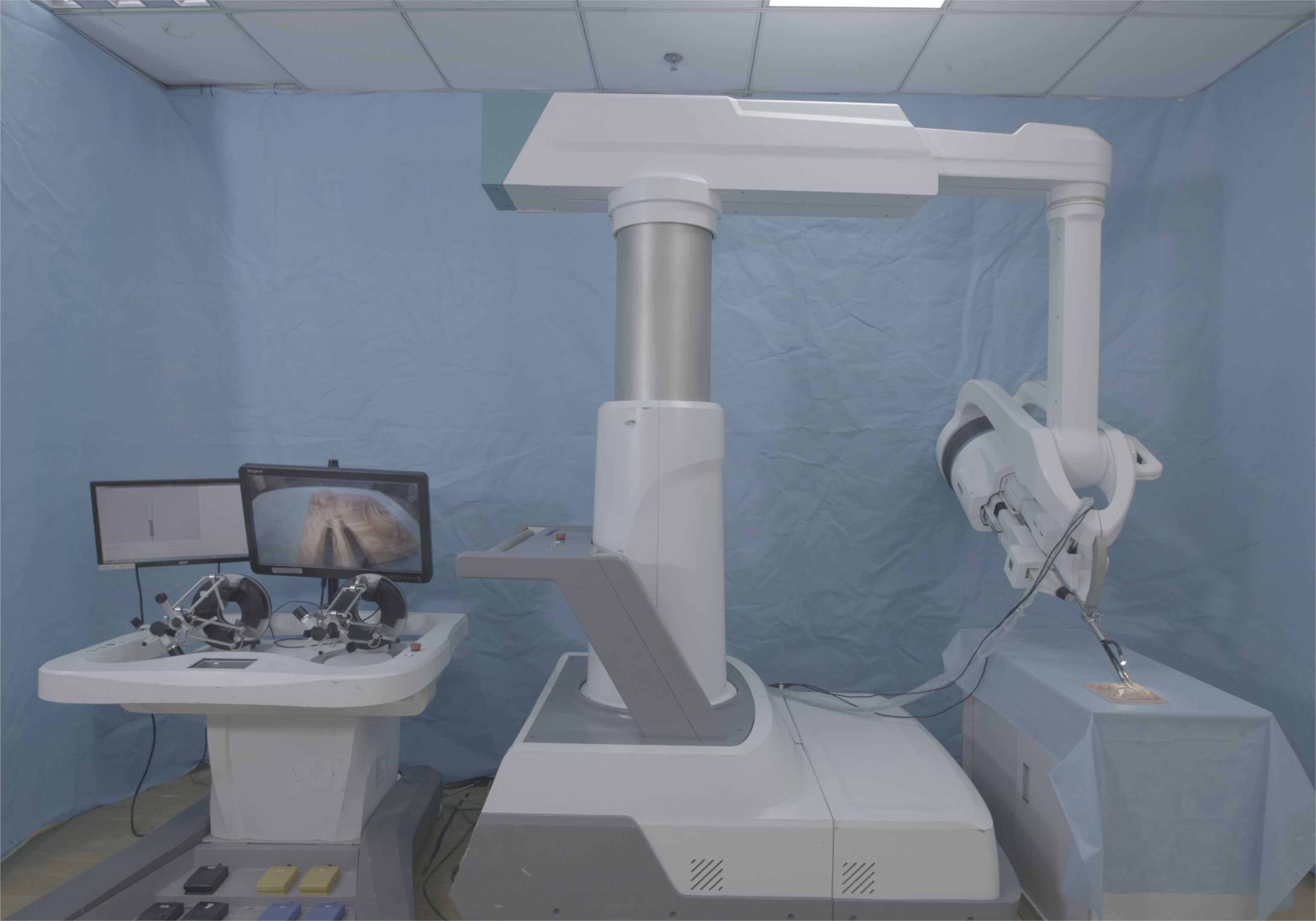
腔道手术机器人
发布时间:2025-09-26|【 大 中 小 】
联系人:赵先生18602165672;郑女士15802449888
成果简介
核心技术:运动解耦和偏置骨架的柔性机构创成、建模以及感知技术,实现柔性机器人精确、稳定控制
重点解决问题:人体腔道手术环境复杂动态多变,人手工操作具有难度和局限性
技术主要特点:多种构型的灵活柔性体及基于布拉格光栅的多元感知技术
核心专利:机器人整体构型,柔性体构型、控制以及多元感知。
成果体现形式:新装备。
技术成熟度:实际环境应用验证。
成果领先性:核心指标优于国内类似技术。
照片视频
附件下载: