


作业型飞行机器人
联系人:赵先生18602165672;郑女士15802449888
成果简介
核心技术包括:接触式作业型飞行机器人本体技术、气流干扰下的接触式作业过程柔顺控制、复杂构型约束下的安全规划与智能操作技术。
重点解决的关键问题:飞行机器人与外界环境任务接触式作业时,飞行机器人的稳定控制问题、作业机械臂接触力反馈高精度控制问题,以及复杂环境下的安全规划和操控问题。
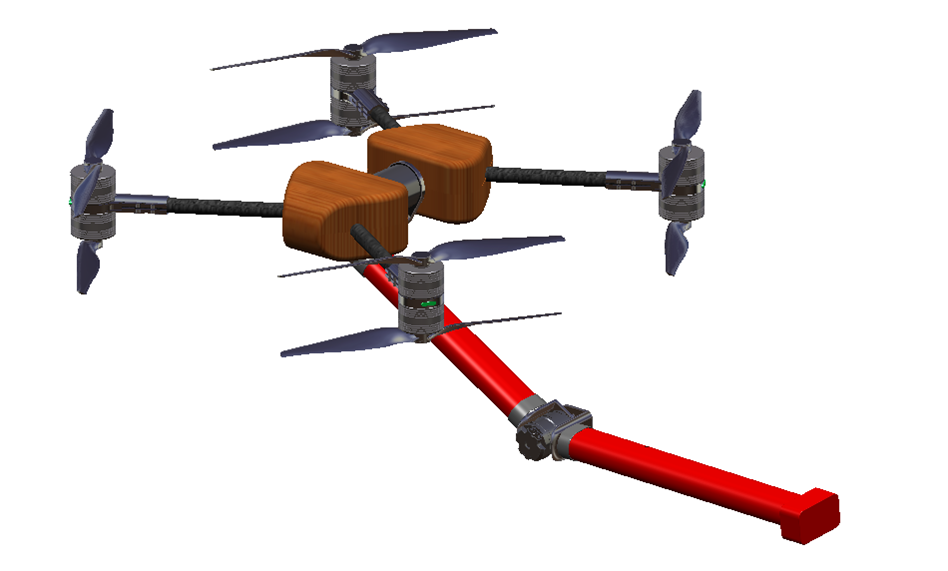
技术特点:飞行机器人携带机械臂可以实现高空全自主接触式作业,打破传统飞行机器人单一的远距离监测的局限,实现与环境的交互操作。
核心专利:飞行机器人抗风扰控制、飞行机械臂、接触式作业飞行机器人等。
成果体现形式:新装备。
技术成熟度:形成原型并验证。
成果领先性:核心指标优于国内类似技术。
照片视频

附件下载:




