海洋信息技术装备中心主要从事海洋机器人(包括自主水下机器人、水面机器人和混合型海洋机器人)、海底预置系统(包括海底观测系统和水下预先部署系统)等移动与固定海洋机器人系统前沿与关键技术研究、产品开发、工程应用和技术服务工作。在国内最早形成(目前也是唯一形成)海洋机器人系列批量产品,开发的海底观测系统率先投入运行。在海洋机器人方面创造多项国内第一,研究成果获得国家科技进步一等奖、中国科学院科技进步特等奖、中国科学院杰出科技成就奖、国防科技进步一等奖等多项奖励。科研队伍具有知名度高、经验丰富、技术全面等优势。研制的海洋机器人,尤其是自主水下机器人广泛应用于海底资源调查、海洋环境观测等领域,为我国海洋科学、海洋工程和国防建设做出重要贡献。
Center of Marine Information Technology and Engineering (CMITE) mainly specializes in marine robotics spanning from advanced and key technology research, product and equipment development, engineering application, to technical service of mobile and fixed marine robotic systems, including autonomous underwater vehicles (AUV), unmanned surface vehicles (USV), hybrid unmanned marine vehicles, seafloor observation systems, and underwater pre-deployed systems. CMITE has developed the first and the only approved products of marine robots in China. It has also developed a seafloor observation system which first putted into use. In the field of marine robotics, CMITE leads the domestic development. Its research results got a number of awards, such as First Prize of National Science and Technology Progress Award, Grand Prize of CAS’s Science and Technology Progress Award, Outstanding Scientific and Technological Achievement Award of CAS, and First Prize of National Defense Science and Technology Progress Award. CMITE’s researchers and engineers are high recognition, rich experience and comprehensive technology. They are making efforts to develop marine robotic systems for seabed mineral resources survey, marine environment observation and other fields, and continuing to have an important contribution for Chinese marine science, marine engineering and national security.

National Defense Science and Outstanding scientific and technological
Technology Progress Award achievement award of Chinese Academy of
主要研究领域
|
水下机器人 l 大排水量自主水下机器人 l 大型自主水下机器人 l 重型自主水下机器人 l 轻型自主水下机器人 l 便携式自主水下机器人 水面机器人 l 半潜式水面机器人 l 近海级水面机器人 l 远海级水面机器人 混合型海洋机器人 l 水面/水下混合型海洋机器人 l 水面/空中混合型海洋机器人 海底预置系统 l 海底观测系统 l 水下预先部署系统 Main Research Areas Unmanned Underwater Vehicle l Large Displacement Autonomous Underwater Vehicle l Large Autonomous Underwater Vehicle l Heavy Weight Autonomous Underwater Vehicle l Light Weight Autonomous Underwater Vehicle l Man Portable Autonomous Underwater Vehicle Unmanned Surface Vehicle l Semi-submersible Unmanned Surface Vehicle l Harbor Class Unmanned Surface Vehicle l Fleet Class Unmanned Surface Vehicle Hybrid Unmanned Marine Vehicle l Underwater/Surface Unmanned Marine Vehicle l Surface/Aerial Unmanned Marine Vehicle Seafloor Preset System l Seafloor Observation System l Underwater Pre-deployed System |
 长航程自主水下机器人 Long-range Autonomous Underwater Vehicle
无人水面艇 Unmanned Surface Vehicle
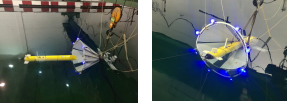
半潜式水面机器人 海底观测网主接驳盒 Semi-submersible Primary Node for Unmanned Surface Cabled Ocean
|
主要研究方向
|
平台技术 l 海洋机器人总体优化设计 l 结构/机构设计 l 动力与推进 l 复杂载荷自动化(含水下对接、浮力调节、自主布放与回收等) l 总体集成与优化 控制技术 l 海洋机器人自主指挥 l 自主生存 l 运动控制 l 容错控制 l 自主避碰 l 智能导航 l 探测及载荷管理 认知技术 l 海洋环境建模 l 目标识别与跟踪 l 主动感知 l 在线学习(环境/状态/态势) 集群技术 l 组网技术 l 协同控制 l 集群智能等 Key Technology PlatformTechnology l Optimization design of marine robot l Mechanical design l Power and propulsion l Payload automation, such as underwater docking, buoyancy adjusting mechanism, autonomous launch and recovery l Multidisciplinary design optimization Autonomy Technology l Autonomous command and control l Autonomous survive l Autonomous motion control l Fault-tolerant control l Autonomous obstacles avoidance l Intelligent navigation l Autonomous detection andAutonomous payloads management Cognitive Technology l Environment modeling l Target identification and tracking l Active sensing l Online Learning (environment, status, situation) SwarmTechnology l Underwater networking technology l Cooperative Control l Swarm intelligence |
 水下对接技术 Underwater docking technology
自主避碰技术 Autonomous obstacles avoidance technology
目标识别技术 Target identification technology
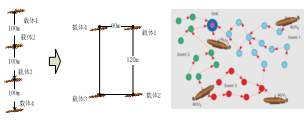
组网技术 Underwater networking technology
|
主要研究成果Research Achievements
通过近30年的努力,目前已形成深海和长航程两大系列自主水下机器人产品。长航程自主水下机器人可连续航行数十小时、续航能力达上千公里,多次刷新了我国自主水下机器人单次航行时间和航行距离的历史记录。它代表着当前我国长航程自主水下机器人的最高水平,在总体技术方面已达到国际先进水平。
Through effort of nearly 30 years, CMITE has now formed the deep-sea and long-range two series of AUV products. The long-range series of AUVs, whose endurance is several tens of hours or nearly thousands of kilometers, repeatedly refreshes the domestic history record of the AUV cursing time and distance in one dive. It represents the current highest level of long-range AUV in China,and has reached the international advanced level in the integrated technologies.
附件下载: