


多平台南海冷泉区立体协同探测开启我国海洋科考新模式
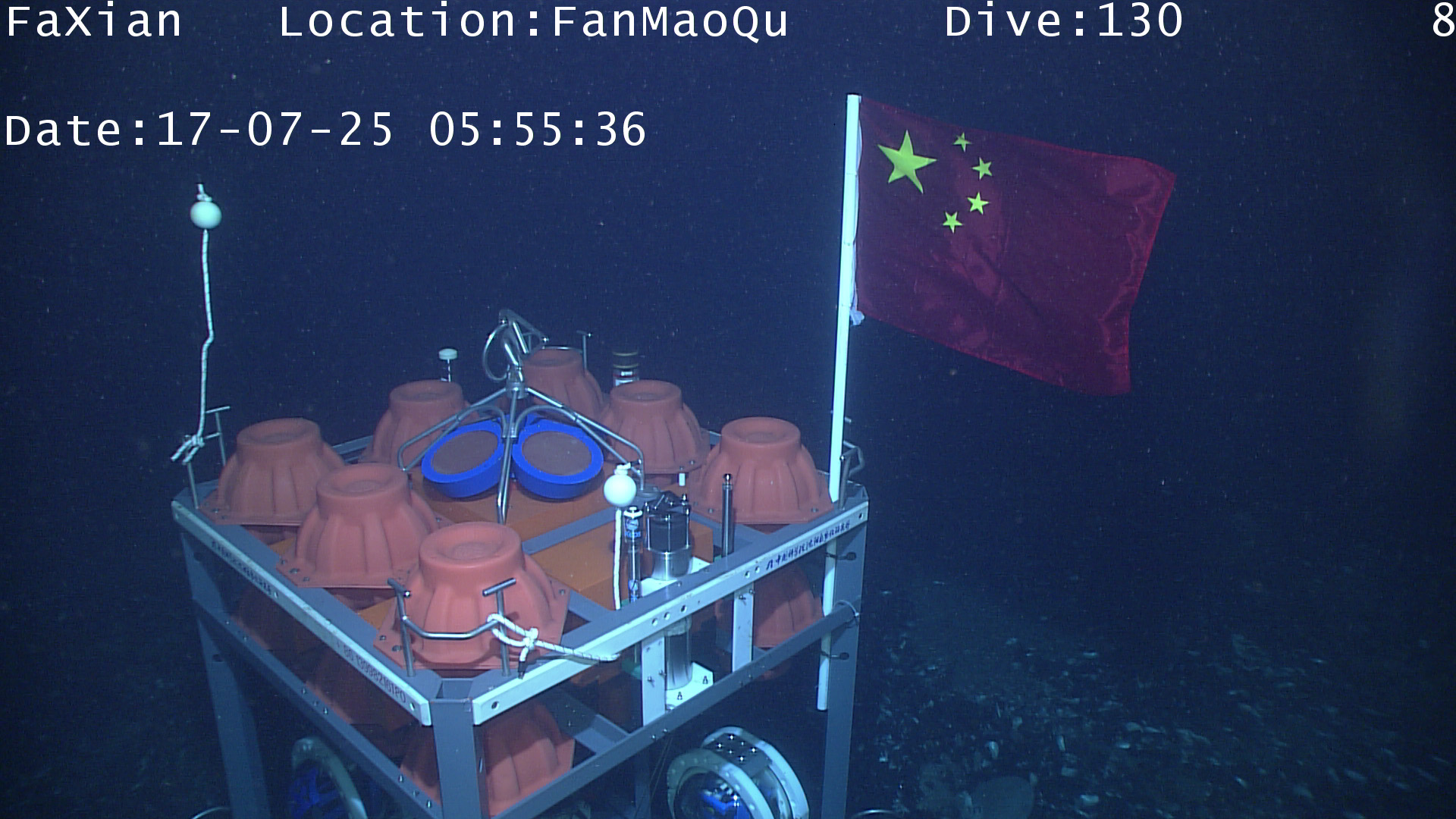
“冷泉”号着陆器海底工作场景

“探索”号AUV布放工作场景
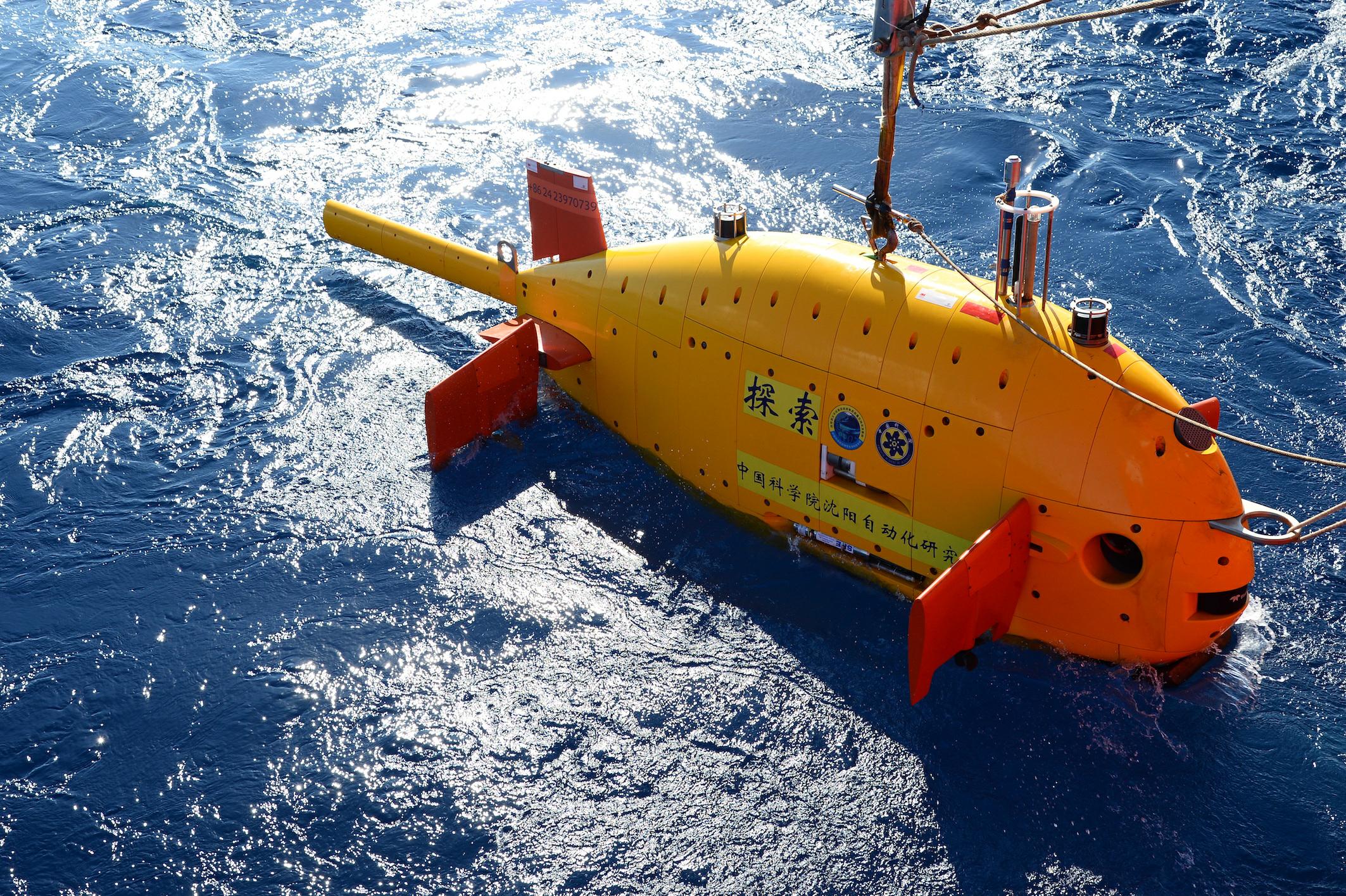
“探索”号AUV准备入水工作场景
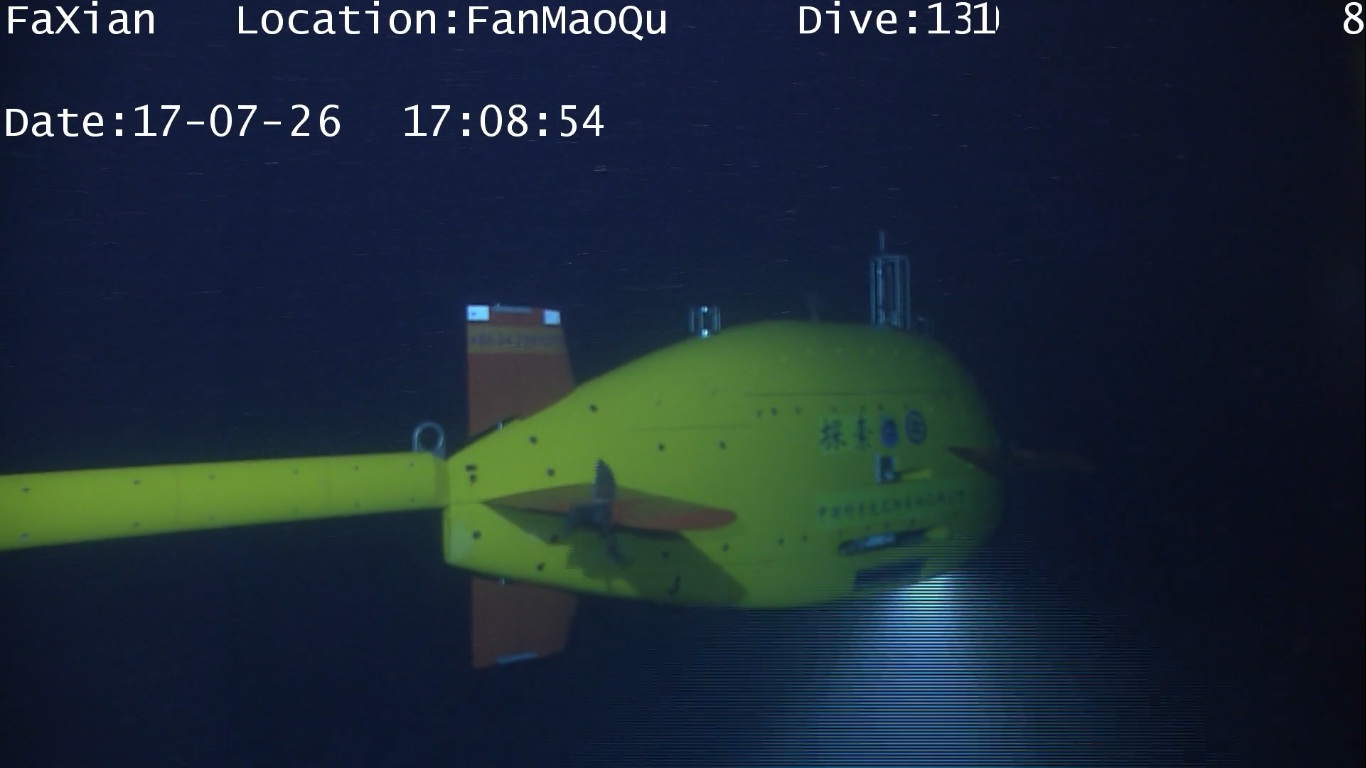
“探索”号AUV海底探测工作场景
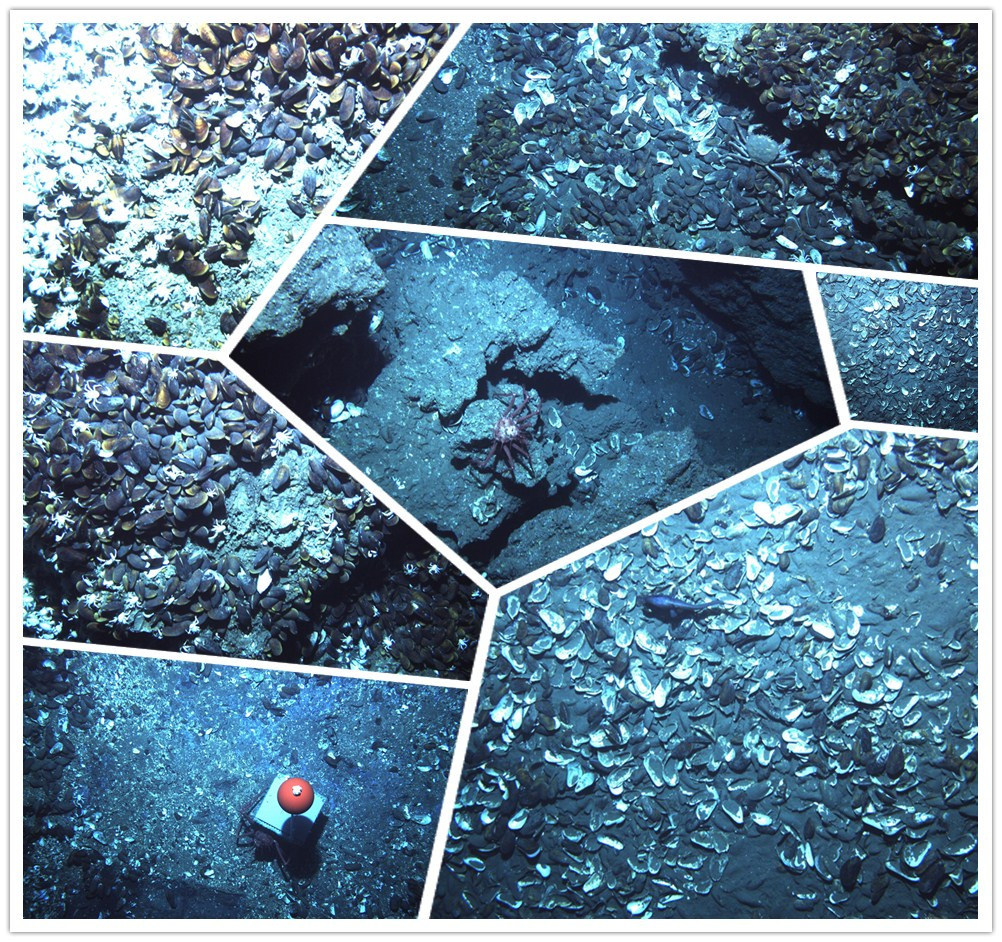
“探索”号AUV拍摄的冷泉区照片
近日,由中国科学院机器人与智能制造创新研究院(筹)(以下简称创新研究院)组织实施的中科院“海洋先导专项”2017年南海综合调查航次第二航段任务圆满结束。创新研究院自主研制的“探索”号4500米级AUV和“冷泉”号3000米级着陆器参与第二航段工作,与专项研制的系列深海技术装备协同作业,实现了多平台南海冷泉区立体协同探测,开启我国海洋科考新模式。
在本航段中,利用我国自主研发多台深海装备首次实现对我国南海冷泉区综合协同调查。通过“探索”号AUV在南海冷泉区开展大面积海底地形地貌精细探测和海底光学调查,获取了近海底水体探测数据,锁定一块海底冷泉疑似区;利用“发现”号ROV进行海底高清摄像和采样作业,为研究影响冷泉区化能生态系统环境要素和生物分布的机制提供了重要资料;在确定科学家感兴趣的观测点后,操控“发现”号ROV将“冷泉”号着陆器精准调整到海底指定位置,对海底冷泉生物群落和环境进行为期三个月的连续观测,分析环境变化对冷泉区生物迁移、生长率和繁殖等关键过程的影响。
在前期工作的基础上,本航段还同步实现了多台探测设备的协同探测与作业及交汇拍摄。首先布放“探索”号AUV入水,在冷泉区预定水域进行光学探测作业;随后,“科学”号科考船前往另一作业水域,布放“发现”号ROV入水,利用搭载在ROV平台上的拉曼光谱探测系统对海底冷泉区天然气水合物、冷泉生物群落和沉积物孔隙水等进行原位和定量分析。在“探索”号AUV完成指定区域的调查任务后,自主航行至“科学”号科考船作业区域。在“科学”船和“发现”号ROV的精准协同配合下,让科学家第一次看到了AUV在海底的工作状态,在我国首次实现了两种不同类型的水下机器人近距离交汇拍摄。
在“海洋先导专项”的支持下,创新研究院研发的系列深海技术装备在国内率先建立了从宏观到微观、从走航到定点、从探测到采样,梯度与原位相结合的深远海探测与作业技术体系,实现了对南海冷泉区立体协同精细探测与作业。在国内首次实现利用ROV在海底精准调整着陆器的观测位置;在无船值守状态下,在国内首次实现AUV长时间大范围自主探测,以及在国内首次实现两种不同类型的深海装备协同探测,极大提高了科考船科考作业效率。
创新研究院作为本航次组织实施单位,各级领导高度重视,周密策划,精心组织,派出10名科考队员参加了第二航段的科考工作。科考队员发扬科学严谨、团结拼搏、超越自我的精神,与船员和工程技术人员密切配合,为取得技术的重大突破做出重要贡献。
本航段的科考工作圆满成功,为我国海洋科考工作树立了典范,是我国深海装备之间以及深海装备与科考船舶协同作业的一次跨越式发展,是我国海洋科考技术体系和平台能力的综合展示,实现了深海探测设备“用得上,有影响”的目标,大大提高了我国海洋科考工作效率和深远海探测与作业能力。(水下机器人研究室、科技处、综合办公室)
附件下载:




