


沈阳自动化所集群机器人研究获进展
自然界中动物的集群行为启发了机器人学的发展,比如模仿蚁群的多机器人路径规划和模仿鱼群的避障与协同控制。随着生物学的进展和学科交叉的发展,发育生物学中的细胞集群行为机理也被用来指引机器人的发展,为机器人领域的仿生类生研究带来了新的灵感。
中国科学院沈阳自动化研究所微纳米课题组科研人员通过机器人集群实验,验证了胚胎发育中的“差异粘附假说”,为理解胚胎发育中形态发生和群体智能行为提供了新的研究手段。
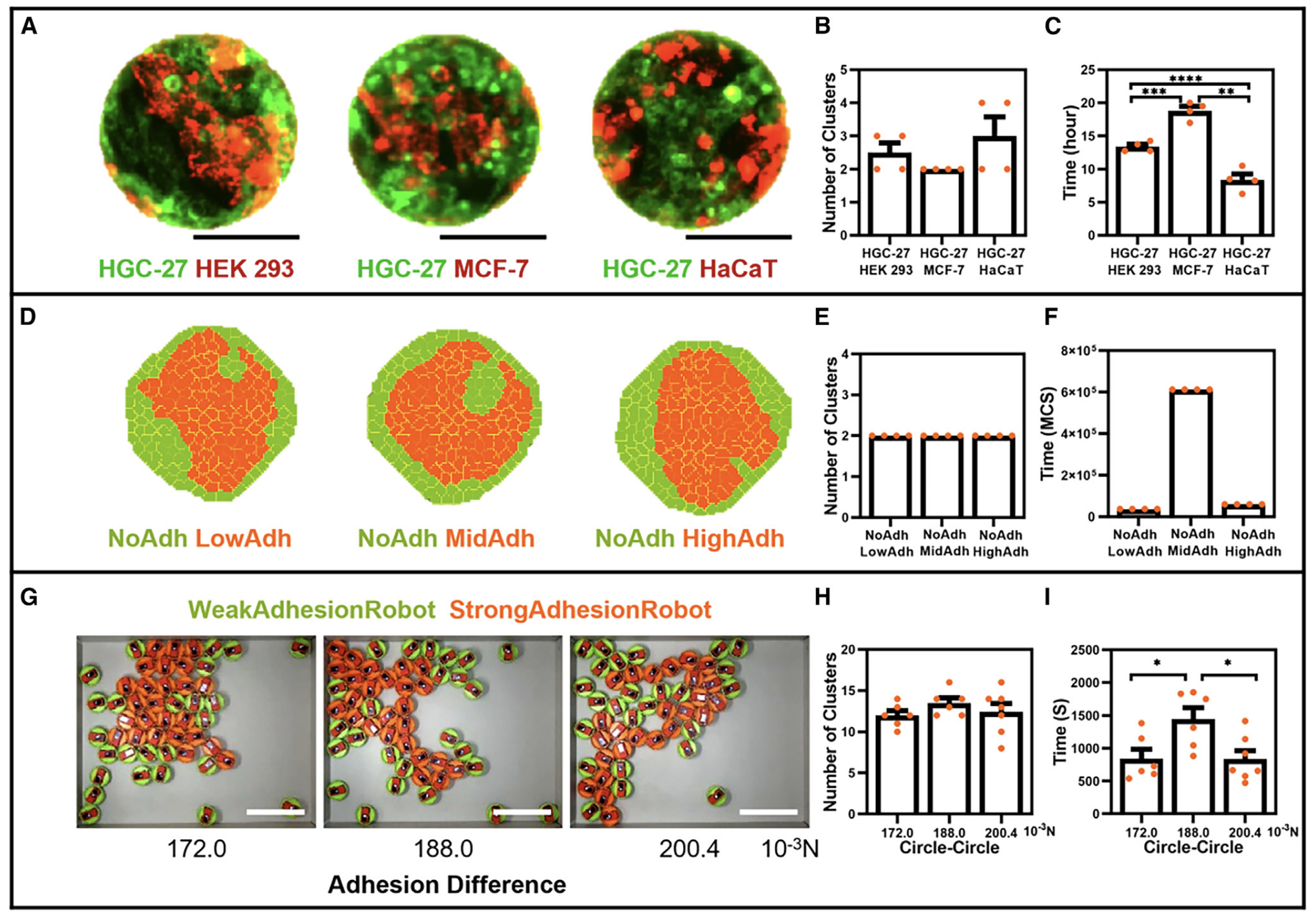
粘附差异水平与机器人集群(细胞集群)分选速度存在非线性关系
科研团队设计了一套包含50个直径10厘米的圆形机器人的集群系统,通过在外壳中嵌入不同强度的磁铁模拟细胞间粘附力的差异。实验发现了粘附力差异与分选速度之间的非线性关系:当机器人之间的模拟粘附力差异显著或非常小时,分选排序快速完成;而在中等粘附力差异水平下,排序过程显著变慢。这一发现随后在细胞培养实验中得到验证,研究人员推测生物胚胎可能通过调控特定基因表达来控制细胞粘附力差异,从而精确控制发育过程中的时序节奏。相关研究成果发表于Cell Reports Physical Science期刊,杨永良研究员、刘连庆研究员为通讯作者,该研究得到了国家自然科学基金项目的支持。
该研究将工程科学与生命科学交叉融合,以机器人集群作为研究细胞集群行为的“物理模拟平台”,揭示了生物发育过程中物理相互作用的关键作用。通过开展深度融合细胞行为的机器人集群控制方法研究,研究团队致力于构建用于生命科学研究的硅基类生命机器人集群系统,实现机器人化的生命科学研究,这将有助于提高生命科学研究效率和扩展机器人技术应用领域。
国际学术期刊Nature旗下Nature Outlook专栏于7月15日发表的文章Robots demonstrate principles of collective intelligence中,关注并介绍了上述成果。(机器人学研究室)
Nature Outlook 文章DOI:doi.org/10.1038/d41586-025-02269-4
附件下载:




