


沈阳自动化所提出:一种机械臂多模态随动感知单元的空间联合标定方法
机械臂多模态随动感知的空间联合标定方法
近日,中国科学院沈阳自动化研究所工业控制网络与系统研究室在机械臂多模态随动感知领域取得了新进展,提出了一种多模态感知单元的空间联合标定方法,相关研究成果以论文形式(Monocular Visual-Inertial and Robotic-Arm Calibration in a Unifying Framework)发表在国际自动化领域的权威期刊IEEE/CAA Journal of Automatica Sinica(自动化学报英文版)。
机械臂是机器人在制造业的典型代表,具有自由度高、灵活性好、通用性强的特点,能够协助工人完成一系列抓取、装配、焊接、喷涂等繁重而危险的任务。为了满足工业现场柔性化、个性化、精细化、智能化的生产需求,机械臂通常配有多模态随动感知单元。单目相机和惯性测量单元在计算精度和响应速度方面具有明显的互补优势,可固定在机械臂末端以随动方式来获取机械臂自身的运动信息和周边环境信息,具有探测范围广、信息量大、感知效果好的优势。
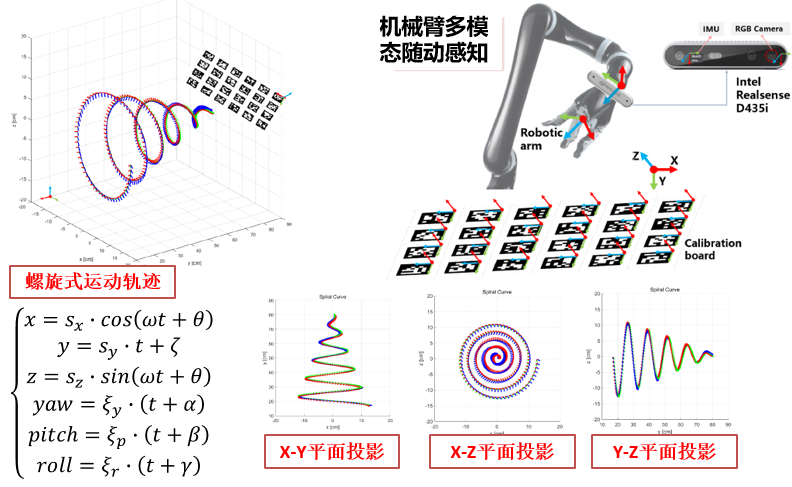
机械臂感知模块间标定精度的高低直接决定了机械臂随动感知性能的好坏。而现有模块间标定方法存在耦合误差大、运动一致性差、6自由度激励不充分的问题。为此,研究人员创新性地设计了一种机械臂螺旋式运动轨迹模型,来保证感知模块在6自由度运动的充分激励。此外,所提模型能够将旋转分量和平移分量的误差完全解耦,避免耦合误差对标定精度的影响。实验环节通过对比X-Y-Z轴向平移和Yaw-Pitch-Roll轴向旋转的均方根误差证明本了方法的比较性优势。该项研究成果为后续开展智能机械臂多模态随动感知的研究奠定了良好基础。 (工业控制网络与系统研究室)
附件下载:




