


沈阳自动化所水下滑翔蛇形机器人研究取得进展

滑翔运动

蛇形游动
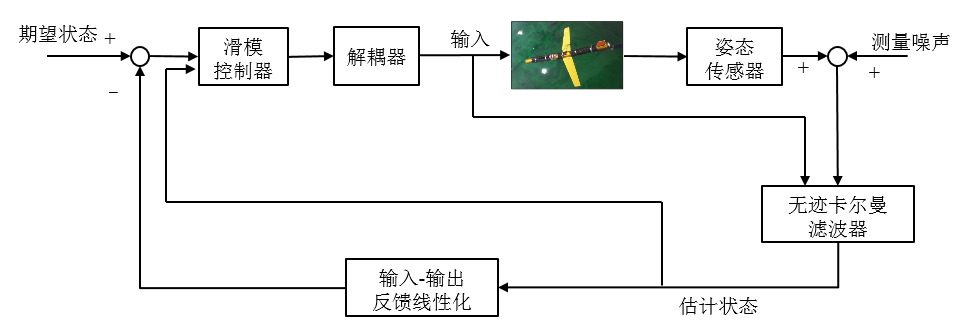
基于无迹卡尔曼滤波器的滑模控制系统
近日,中国科学院沈阳自动化研究所研制出一种结合水下滑翔机和水下蛇形机器人特点的水下滑翔蛇形机器人,该机器人可以实现净浮力驱动的滑翔运动和关节力矩驱动的多种游动步态,具有续航能力强和机动强的优点,相关研究成果近期发表于Science China-Information Sciences。
针对水下滑翔蛇形机器人的滑翔运动系统存在系统非线性耦合;实际流体不确定性、传感器测量噪声、执行器误差等引起的扰动,可能影响系统的跟踪效果;部分状态量(比如滑翔速度)较难通过传感器直接测量等问题,沈阳自动化所仿生机器人课题组研究人员提出了非线性闭环控制系统框架概念。通过解耦和反馈线性化,把复杂的非线性系统转化为等效的线性形式,然后基于趋近律方法设计滑模控制器,降低抖动并且实现鲁棒控制。通过无迹卡尔曼滤波器,对测量噪声进行滤波和对未知状态量进行估计,该方法通过无迹变换处理均值和协方差的非线性传递问题,保留了系统高阶项,具有精度高、稳定性强的优点。提出的闭环控制框架对一些其他非线性系统具有一定的通用性。
该研究得到了国家重点研发计划的支持。(机器人学研究室)
附件下载:




