


沈阳自动化所微纳观测研究成果发表于Nature Communications
纳米尺度实时视觉反馈、免标记成像技术对于机器人在纳米尺度操作、检测具有重要意义。中国科学院沈阳自动化研究所机器人学国家重点实验室微纳米课题组结合微纳光学、机器人学和自动化技术,在物理学突破的基础上,成功研发了具有实时视觉反馈能力的扫描微透镜超分辨成像技术 (Scanning Superlens Microscopy, SSUM),该成果为纳米机器人功能和性能的提升奠定了坚实基础。相关成果发表于Nature Communications(2016, 7:13748. DOI: 10.1038/ncomms13748,影响因子11.47),沈阳自动化所2013级博士生王飞飞为论文第一作者,刘连庆研究员和李文荣研究员为通信作者。
超分辨观测是科学界的重要研究方向,是生物科技、纳米科技和信息科技等进步的重要基石。众所周知,人眼所能分辨的最小颗粒直径约为100微米,尽管光学显微镜极大地提升了人的观测能力,但是根据阿贝衍射定律,光学显微镜所能观测的物体极限尺寸为200纳米,仍然不能满足科学发展的需求。近来,研究人员为了突破衍射极限,发展了STED、PALM、STORM等一系列新型光学成像技术,极大地扩展了人类观测微小世界的能力。但是这些成像技术多采用时间换空间的方式,存在速度慢、需要荧光染色、外部激光激发等问题。这就使得这些超分辨荧光显微镜在实际应用中存在一定局限性,考虑到纳米机器人操作对象和工作环境,这些方法的局限性将表现得尤为突出。
为纳米机器人提供锐利之眼,实现纳米尺度生命物质和非生命物质的动态追踪,对提升纳米机器人的功能和性能具有重要意义。这就需要研究新型成像技术以弥补现有技术不足。针对上述需求,微纳米课题组在对微透镜超分辨成像物理机制突破性研究的基础上,借鉴机器人的感知、决策和控制理论,设计并搭建了具有自主知识产权的超分辨成像系统,在免标记自然光照射条件下,对活体细胞、IC芯片等实现了实时、活体、大范围超分辨成像,分辨率达到65nm,验证了相关理论的先进性和正确性,并且随着技术的发展,该分辨率将得到进一步的提升。
围绕超分辨观测,课题组开展了长期深入的研究,在前期工作中开展了基于近场白光干涉的三维超分辨成像、基于微透镜的超分辨内窥镜、微透镜阵列制造方法的研究,相关结果连续发表在Applied Physics Letters、Optics Express、 Scientific Reports上。这些方法和技术将在未来机器人体内、体外微纳检查和操作中发挥重要作用。
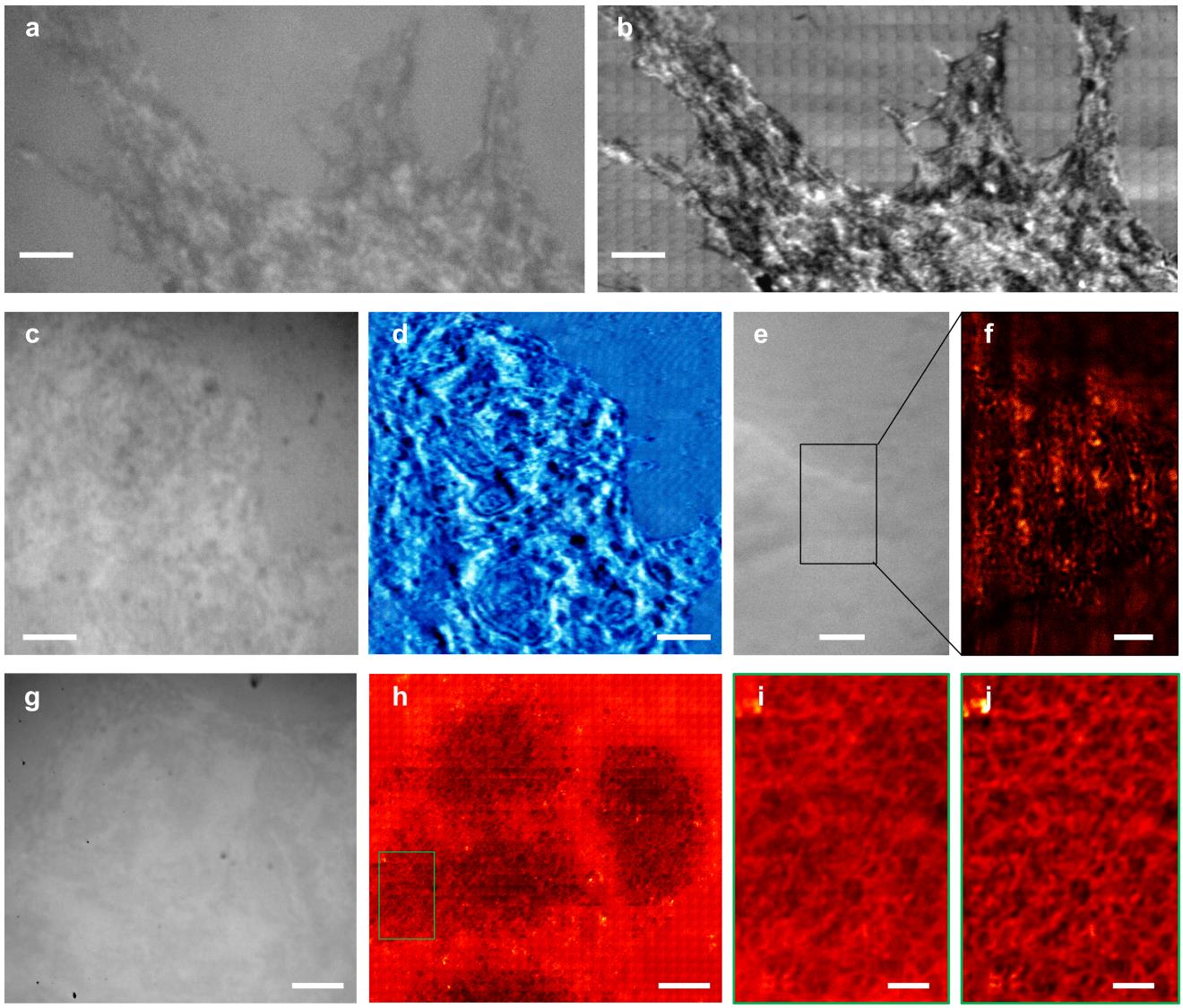
(a,c,e,j)普通光学显微镜对细胞进行的成像。(b,d,e,f,h,i,j) SSUM实现的超分辨成像。
上述研究得到了国家自然科学基金委,中国科学院、机器人学国家重点实验室的大力支持。(机器人学研究室)
原文链接:http://www.nature.com/articles/ncomms13748
摘要:Nanoscale correlation of structural information acquisition with specific-molecule identification provides new insight for studying rare subcellular events. To achieve this correlation, scanning electron microscopy has been combined with super-resolution fluorescent microscopy, despite its destructivity when acquiring biological structure information. Here we propose time-efficient non-invasive microsphere-based scanning superlens microscopy that enables the large-area observation of live-cell morphology or sub-membrane structures with sub-diffraction-limited resolution and is demonstrated by observing biological and non-biological objects. This microscopy operates in both non-invasive and contact modes with ∼200 times the acquisition efficiency of atomic force microscopy, which is achieved by replacing the point of an atomic force microscope tip with an imaging area of microspheres and stitching the areas recorded during scanning, enabling sub-diffraction-limited resolution. Our method marks a possible path to non-invasive cell imaging and simultaneous tracking of specific molecules with nanoscale resolution, facilitating the study of subcellular events over a total cell period.
附件下载:




