

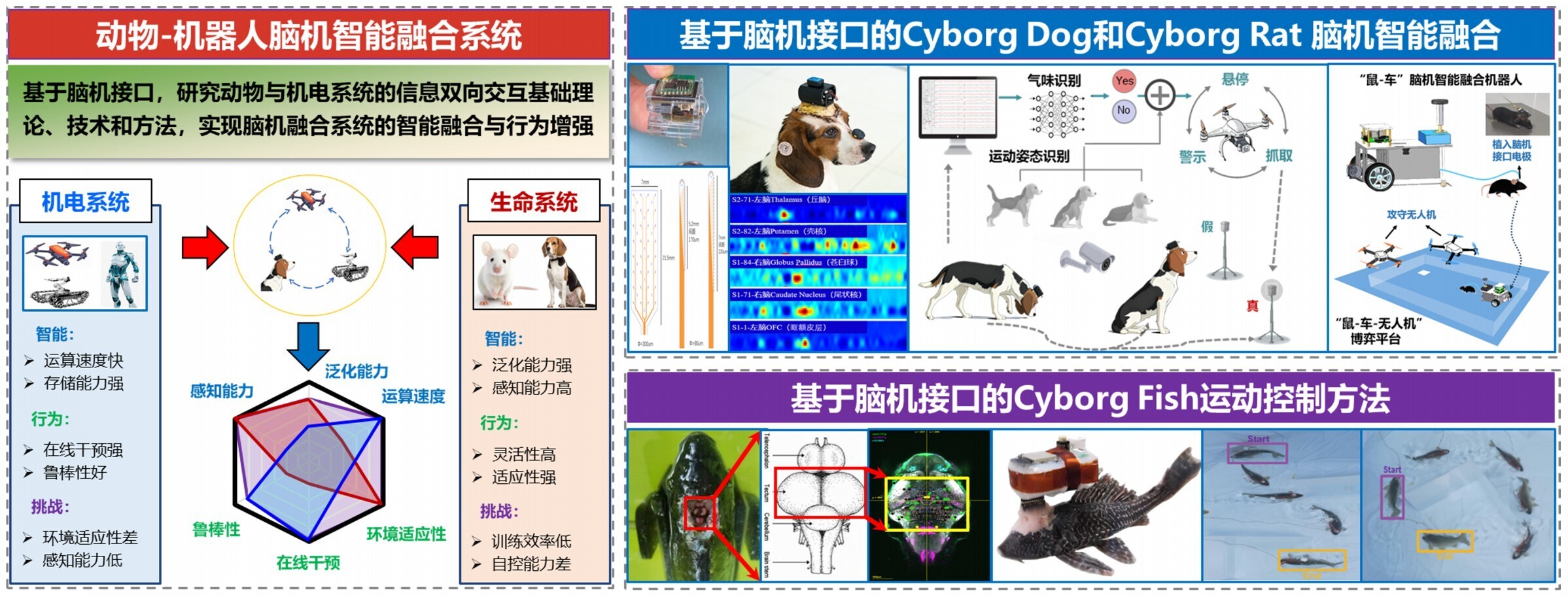
脑机接口是沟通生物大脑和外部物理世界的信息桥梁,通过脑机接口技术有望构建生命体和机器人等无人智能体的脑机融合系统,实现生命系统-机电系统的智能融合与行为增强。本方向重点研究具身脑机接口技术,构建动物-机器人脑机智能融合系统;研究动物与机器人的信息交互理论、方法与技术,发展跨介质多模态脑-机感知与智能融合及融合系统的协同控制和集群博弈理论;揭示生-机交互过程中动物大脑神经环路工作机制,探索大脑神经元集群非线性动力学特性与智能涌现的关系,发展脑启发的具身智能理论。本研究方向将促进脑机接口及其应用技术的发展,推动新型混合机器人和人工智能的进步。(研究方向负责人:王文学,研究员,博导,邮箱:wangwenxue@sia.cn)
 关注微信公众号
关注微信公众号
关注微信公众号
