

机器人被广泛用于汽车制造、飞机喷漆等工业自动化领域,但用于生物医学的微结构部件装配尚未实现自动化,将多个微结构部件装配成可发挥功能的整体结构面临诸多挑战。然而,微型机器人是微结构部件操作及装配的可能解决方案。
近期,中国科学院沈阳自动化研究所微纳米课题组的科研人员在前期利用气泡微型机器人对微结构实现了二维及三维操作(包括二维移动、旋转和三维翻转、滚动等)基础上,创新性地利用气泡微型机器人实现了对多个微结构的一体化装配及驱动。通过巧妙设计微结构具有卡扣结构,气泡微型机器人可以将多个独立微结构装配成不会散开的一体化结构,例如由多个小齿组装成完整齿轮微结构。气泡机器人也可作为驱动器驱动这些结构运动,包括驱动蛇形结构弯曲,齿轮旋转,小车运动等。该方法为微结构的操作及装配,体外生物组织构建提供了新的解决方案。相关成果发表在中国科学院一区Top期刊《ACS Applied Materials & Interfaces》,并被该期刊选为亮点工作进行了报道。
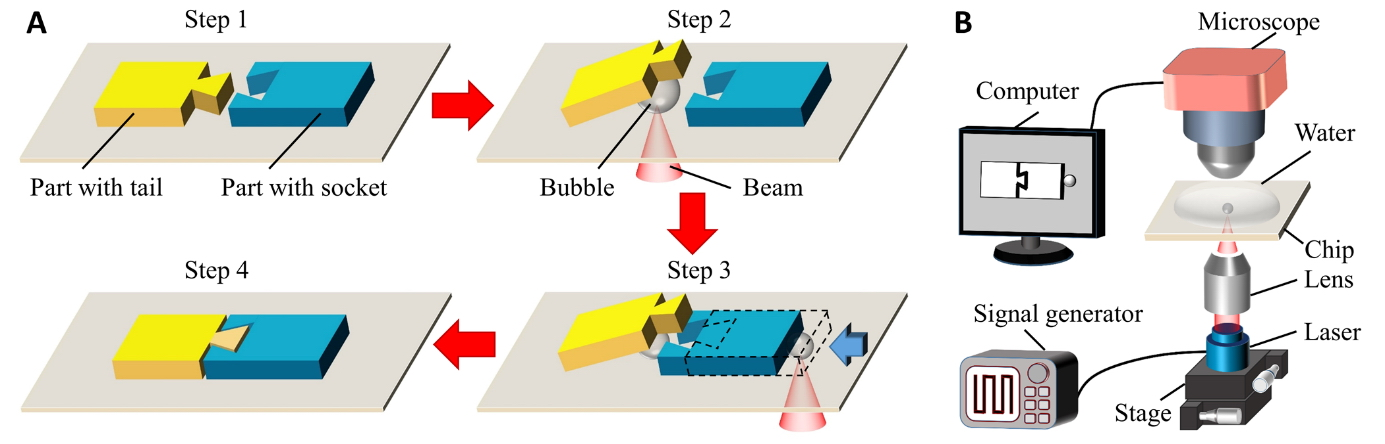
气泡微型机器人装配微结构过程示意图

气泡微型机器人一体化装配及驱动齿轮结构
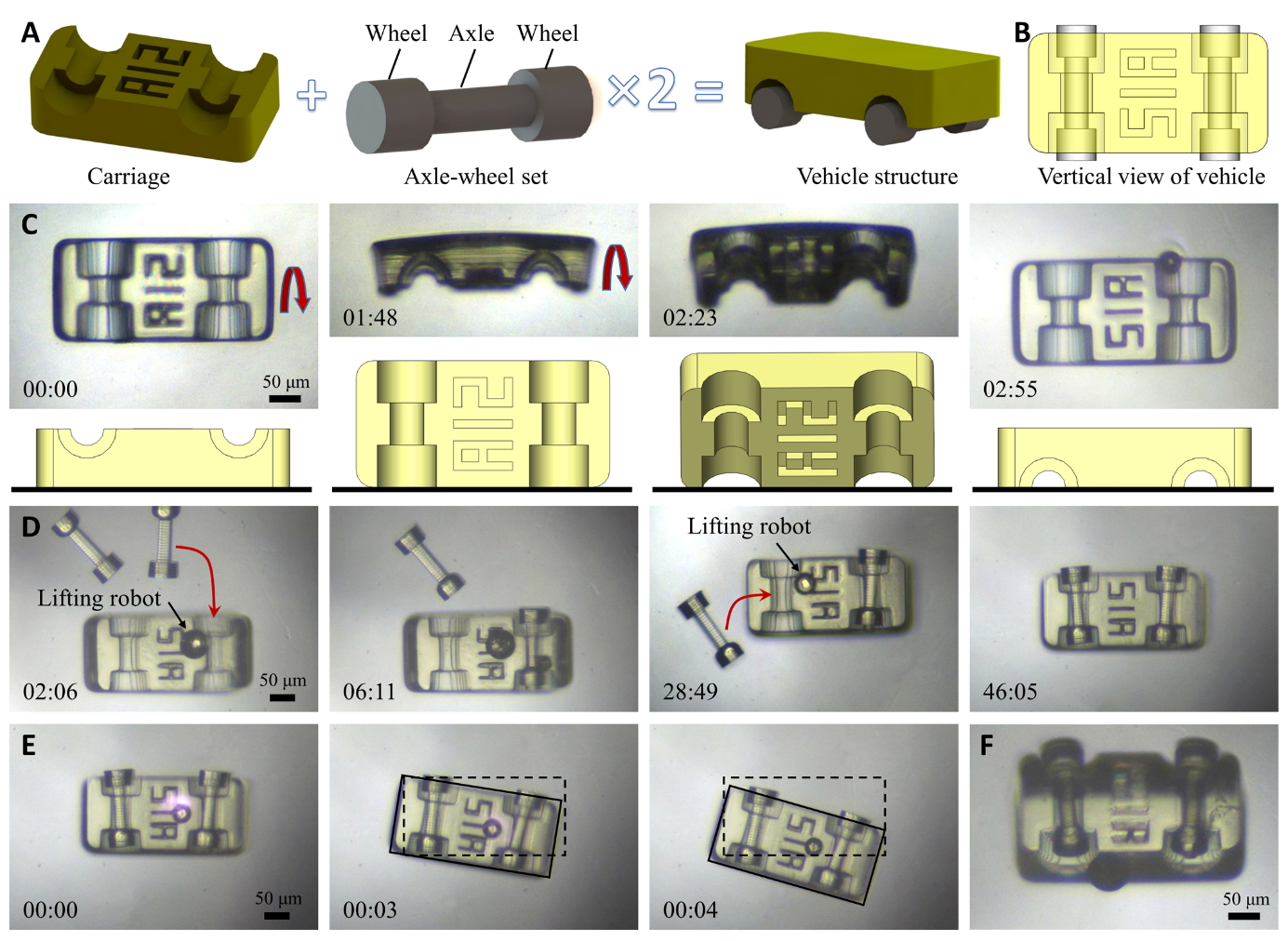
气泡微型机器人装配小车结构
 关注微信公众号
关注微信公众号
关注微信公众号
