


新概念水下机器人——水母机器人
在海洋中蕴藏着丰富的矿物资源、海洋生物资源和能源。海洋学家通过观测海洋,可以预测地震、海啸及其它一些自然灾害;生物学家通过观察生活在深海烟囱类热液矿喷口附近的浮游生物以及微生物进行相关研究。要完成以上任务却都离不开水下机器人,因此,近几年水下机器人备受世界各国关注,发展也相当迅速,水下机器人主要包括遥控水下机器人和自主水下机器人。图1展示了目前世界上几款比较知名的水下机器人。
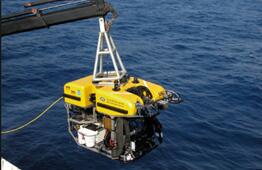

Footage-美国 海沟号-日本


潜龙号-中国 Hugin-挪威


Remus-美国 蓝鳍金枪鱼-美国
目前世界上常用的自主水下机器人大多数只能沿着轴线方向运动,并且不能实现悬停功能及垂向运动功能,运动灵活性较差,同时体积较大,重量较重,此外大多数自主水下机器人受到自身携带能源的限制,不能够进行定点长期观测任务。
近几年应市场需求,多款新概念水下机器人应运而生,图2列出了几种概念型水下机器人。

图2
虽然近几年新概念水下机器人层出不穷,但主要以遥控型水下机器人为主。目前国内外对于定点或小范围海洋观测的小型自主水下机器人研究的相对较少,不过它们具有良好的的发展前景和应用空间。
借鉴水母运动机理,采用仿生学原理,本团队设计了一款能够在定点或小范围观测并且能够实现垂直方向运动的小型模块化自主水下机器人,并将其命名为机器水母。众所周知,水母是海洋中常见的一种生物,外形呈蘑菇状,分伞部和口腕两部分,伞部隆起呈馒头状,口腕各部生有若干棒状附器。其靠发达的内伞环状肌有节律的伸缩,挤压伞部的海水而获得前进的动力,依伞顶部的方向作缓慢游动。其运动过程如图3所示。
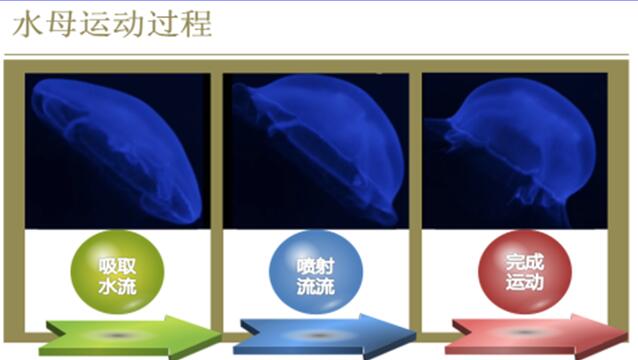
图3
机器水母仿照水母结构分为上下两部分,依靠上部分的螺旋桨产生推力,依靠下部分中的丝杠结构调节姿态来改变其航向。其总高度为341mm,圆柱外壳直径为150mm,最宽距离为254mm,总体重量为3kg左右。它的主要特点是结构简单、造价低廉、便于携带。机器水母的外形及内部结构如图4所示。
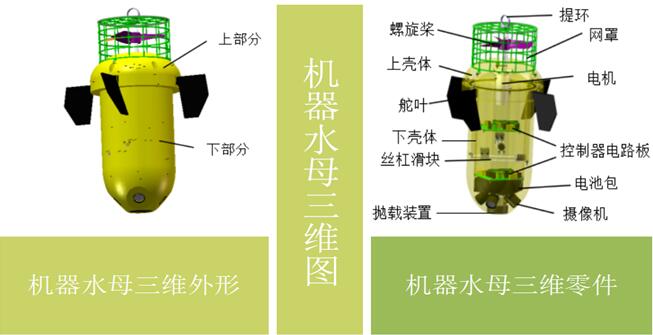
图4
加工组装后的机器水母如图5所示。

图5
机器水母的主要工作任务是对定点或小范围区域进行实时观测,尤其适用于深海环境,因为深海处水流相对较小,机器水母可长时间悬停在某一定点。图6展示了机器水母上浮、下潜、悬停、斜向运动的功能。

图6
该型是第一代机器水母,主要进行观测用。其下半部分装有4个防水摄像机是为了保证水下机器人可以随时观测其周围状况,最下端的抛载装置可以在遇险时使机器水母完成上浮。摄像机和抛载装置三维示意图如图7所示。

图7
机器水母内部安装有LED灯,使操作者在夜间也能够很方便的发现机器水母的所在位置。其夜间工作模式如图8所示

图8
该款机器水母不仅可以用于定点或小范围海洋观测,获取所需信息;而且由于其造价低廉,还可以用作娱乐产品,如水下拍照、录像等,丰富人们娱乐生活;此外,也可以用于实验教学平台,提高学生对水下机器人的感性认识等等。
西塞罗曾说:“谁控制海洋,谁就能控制世界。”21世纪是海洋的世纪,为此,我们只有把握现在,努力学习水下机器人知识,才能更好的了解海洋、接近海洋、认识海洋,将来才能更好的把握海洋、开发海洋、利用海洋。
“长风破浪会有时,直挂云帆济沧海”。让我们携起手来,共同为水下机器人事业而奋斗,早日实现蓝色的中国梦——海洋梦!
作者:中科院沈阳自动化所 海洋信息技术装备中心 白桂强
附件下载:




