


空间机器人的应用和发展
从古到今,每当人们仰望浩瀚的星空,总会生出无限的遐想。于是从远古时代,人们就开始对太空进行探索。从地面向太空的观察和推演到科学试验与通信卫星发射,到空间站的建立,各种太空飞行器的成功上天与工作,宇宙太空已成为人类另一个生存和工作的空间。
随着航天事业的不断发展,如今人类已经不再局限于把飞行器送上天,还要求它们完成各种空间任务。在地球上尚且需要制造机器人来代替人完成各种工作,而在太空中只有几个宇航员,在这样危险的环境中,就更需要采用空间机器人协助或代替宇航员完成大量艰巨危险的任务。
空间机器人大多都是安装在航天器主体上的机械臂,这样在需要的时候它们就可以利用自己长长的机械臂对航天器进行操作了。那么我们需要空间机器人完成什么样的任务呢?
虽然飞行器上天前都会对其进行非常认真的检测,但是一旦飞向太空,面对复杂的环境,脱离了人的绝对控制,也难免会出现故障,这时如果不能对其进行及时的检修,昂贵的飞行器就会成为太空垃圾。
据有关数据显示,目前全世界每年发射的卫星数目为80~130颗,然而大约有2%的卫星未能正确进入轨道,已进入轨道的有8%左右的卫星不到30天即宣告失效。这些失效的卫星对航天事业造成了巨大损失。例如我国于2006年10月发射的“鑫诺二号”卫星,由于太阳帆板及天线未能顺利展开而变成了一颗废星。不包括火箭发射费用,仅这颗卫星就耗资20亿人民币。那么我们能不能在卫星发生故障时就及时对其进行修理呢?如果能够像下图一样,在卫星上面安装一个长长的机械臂,那么在事故发生后,就可以对卫星进行及时维修以避免这样的损失了吧。
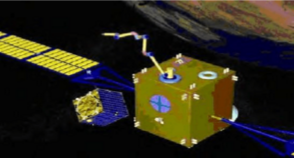
图1 空间机器人系统
国际太空站上有那么多东西,需要经常搬来搬去地进行组装,有时我们还需要对大型空间机构进行维修,与其让宇航员冒着生命危险进行操作,不如让他在舱内遥控机器人进行操作,这样显得更加安全、方便。
世界上第一个成功应用于飞行器的空间机器人系统为加拿大MD Robotic公司于1981年研制的航天飞机遥操作臂系统(Shuttle Remote Manipulator System, SRMS),如图2所示。该机械臂具有六个自由度,全长15.2m,其中大部分都是机械臂的长度,这样就保证了机械人精巧的小手可以到达飞行器上任何需要达到的位置。该机械臂可以由计算机进行编程控制,也可以由宇航员手动控制。SRMS由宇航员在舱内进行操作,可以用于展开和回收卫星、组装国际太空站和传送部件。2005年,SRMS协助宇航员成功地完成了“发现者”号航天飞机的热防护系统维修工作。哈勃太空望远镜已经上天很多年了吧,期间进行过五次维修,该机械臂就派上了用场。
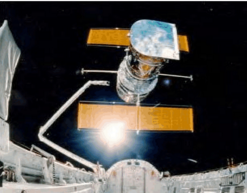
图2 SRMS系统
上面的机器人主要靠一个长长的手臂进行操作,下面这款机器人却与人相像,可以协助宇航员完成任务,因此我们也亲切地称呼他为机器人宇航员。

图3 美国NASA开发的机器人宇航员
他只有一条腿,以固定其位置。他的双手可以像人一样灵活操作,甚至超过人类手臂的运动范围。他能够使用大部分的舱外作业工具,主要是作为助手与航天员一起工作,并执行日常维修任务。
我国空间技术处于快速发展的过程中,近年来陆续发射了“天宫一号”、“天宫二号”目标飞行器和“神舟十一号”宇宙飞船,进行了自动交会对接,并争取在2020年建立长期有人居住的空间站。为了实现这个空间战略目标,我国正在加紧空间机器人的研究并取得了显著的成果,目前我国已经跨入空间智能机器人领域国际先进行列。下面这幅图片就是2015年我国在世界机器人大会上展出的空间机器人。

这个机械臂长达10余米,有7个关节。空间机械臂身强力壮,可举起数十吨重的东西,却也可以轻轻捏起一片鸿毛。技术人员还创造了一种有趣的“走路方式”——机械臂可头尾互换,实现机械臂大范围空间的灵活应用,通过爬行达到每一个角落。大个头的它能够实现大范围大负载的操作,同时局部的精细化操作也难不倒它。机械臂是由多个相似模块组成的,模块之间可以任意组合以形成一种新的机械臂。机械臂损坏了还可以将损坏的模块快速更换和进行在轨维修。
相信随着我国航天事业的不断发展,一定会有更加智能、灵活的空间机器人作为航天器的贴身小卫士!
作者:中科院沈阳自动化所 空间自动化技术研究室 秦基伟
附件下载:




