


北极ARV
今天为大家介绍一款沈阳自动化所自主研发的极地科考机器人:北极冰下自主/遥控海洋环境监测系统(简称:北极ARV)。 自2002年起,沈阳自动化所在国内首次提出了ARV概念——ARV是一种集自治水下机器人(AUV)和遥控水下机器人(ROV)技术特点于一身的新概念水下机器人。
2008年7月,第一代北极ARV搭乘“雪龙”号科考船,随队出征我国第三次北极科考,在北纬84.6°开展了冰下调查,圆满完成了处子秀。

第一代北极ARV小档案:
重量:350kg
长度:2.1m
宽度:0.65m
高度:0.7m
最大潜深:100m
作业半径:3km

2008年北极科考场景
初战告捷,经过一系列改造,这款北极科考机器人于2010年7月随“雪龙”号再次踏上了北极科考的征程,参加了我国第四次北极科考任务。
在北纬86度50分首次从冰洞下放,开展冰下调查工作并取得成功,刷新了我国水下机器人在高纬度的作业记录。
2011年10月,十一五“863”课题“北极冰下自主/遥控海洋环境检测系统”通过验收。
第二代北极ARV小档案:
重量:180KG (成功瘦身近一半重量)
长度:1.07m
宽度:0.65m
高度:0.92m
最大潜深:100m
作业半径:3km
2014年8月,第二代北极ARV搭乘“雪龙”号科考船踏上了我国第六次北极科考之旅。于8月18日至26日在长期冰站进行了冰下作业。在科考作业间隙,北极ARV对“雪龙”船底的海冰分布进行了详细拍摄,首次获得了“雪龙”号完整的冰下视频资料,为我国将来建造新型破冰船提供第一手资料。

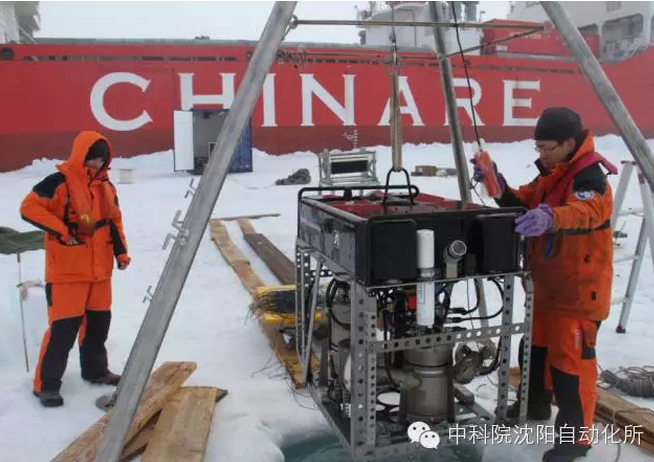
齐心协力开凿冰洞

将ARV下放至冰下

冰下视频截图

工作区域

围观作业的北极熊
北极ARV已成为北极科考中一种有效、连续、自主、实时的观测手段。
看似不大的北极ARV携带了温盐仪、光通量测量仪和水下摄像机等多种测量设备,具有多种科学观测能力。可获得冰下光透射辐照度、冰底形态、海冰厚度、温度、盐度、深度和海洋环境参数等多种科学观测数据,极大地补充了现有的北极冰下监测手段。
北极海冰融化对我国气候有着一定的影响。北极科考的主要目的就是了解北极海冰快速融化的机理。
通过北极ARV可连续测量出海冰吸收的太阳辐射能的空间变化,估算出同纬度更大范围海冰对太阳辐射能的吸收。
另外,通过水下机器人测量得到的冰厚图,可以反映出冰底的粗糙度,从而分析出海水对冰的影响等。
(图文来源:水下机器人研究室)
附件下载:




