


微纳米机器人

在血管中的微型机器人(概念图)
在我们所处的宏观世界中有多种机器人,比如各种工业机器人,服务机器人,水下机器人等。而在微观世界中进行探索和操作则需要一类“小”机器人,它们能在微米尺度甚至纳米尺度进行操作,这就是微纳米机器人。这一期SIA机器人大讲堂我们就来认识一下沈阳自动化所机器人家族中的微纳米机器人。
让小机器人进入人体血管探测、去除癌变细胞、进行定点给药一直是科学家的梦想。在这个梦想的激励下,沈阳自动化所微纳米研究团队研制了微型机器人,包括光驱动仿细菌微型机器人及磁驱动微型机器人。这类微型机器人长度为500微米到1000微米之间,可在液体中进行三维游动,运动速度可达到5mm/s。
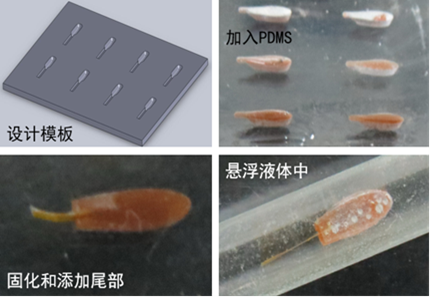
光驱动微型机器人

磁驱动微型机器人
由于微型机器人尺寸小,所以它可以进入比较狭小的空间,比如微流控管道,生物芯片,甚至生物体血管内。通过控制微型机器人的运动,可遥控微型机器人运动到指定位置进行探测。目前研究团队正在研究微型机器人对细胞行为学的影响,期盼早日实现微型机器人进入人体进行检测和治疗。
微型机器人可在微米尺度进行操作,为了在更小的纳米尺度进行操作,则需要纳米操作机器人大显身手!沈阳自动化所微纳米研究团队在2004年研制了具有力觉及视觉反馈的纳米操作机器人,该机器人本体不小,但机器人前端执行器却很小。该执行器是一根又细又尖的探针,探针最前端的曲率半径只有几十纳米。在操作者控制下,纳米操作机器人不仅可对样本进行纳米级扫描观察,而且可进行纳米级操作及加工,也可以检测细胞分子力甚至排列原子。
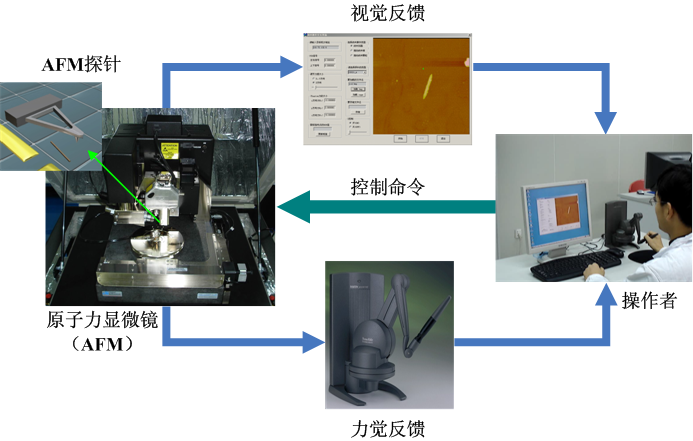
纳米操作机器人
目前纳米操作机器人已和多种技术相结合(光诱导介电泳技术,膜片钳技术等),应用在微纳米加工、宏微一体化制造、细胞多元信息检测等学科领域,取得了一批具有国际影响力的研究成果。
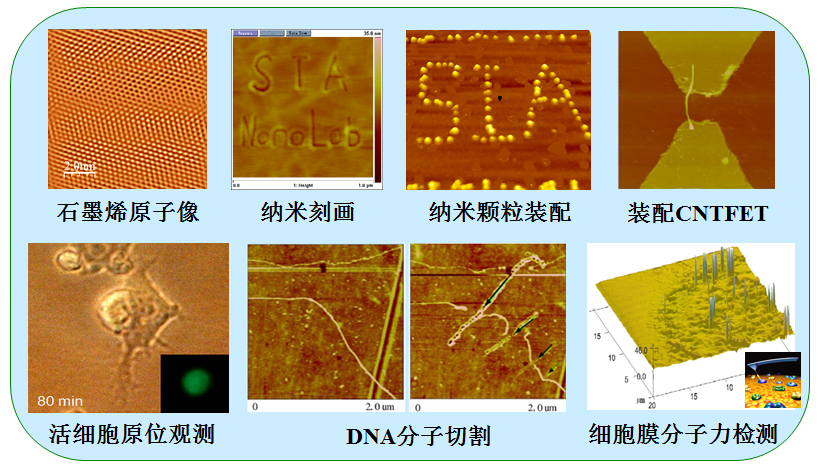
纳米操作机器人的应用
微型机器人及纳米操作机器人构成了沈阳自动化所微纳米机器人的两个家族,它们成为我们宏观世界与微观世界的桥梁,将为我们探测及了解微观世界发挥越来越重要的作用。(图文:机器人学研究室微纳米研究团队 撰文 焦念东)
附件下载:




