


7000米深海作业机械手
提到机械手,大家一定都不会陌生,无论是在科幻电影里还是在现代化的工厂,都可以看到机械手的身影。沈阳自动化所机器人家族中,有这样一款可用于7000米深海环境的机械手,今天就和大家说一说这款机械手。
在“十二五”863海洋技术领域“深海潜水器作业工具、通用部件与作业技术”课题的支持下,沈阳自动化所水下机器人技术团队研发出这款7功能主从伺服液压机械手。
该机械手系统由主控制器(含主操作手)、水下阀箱及从手组成,开展水下作业时操作主手,从手追随主手动作。从手可执行肩部摆动、肩部俯仰、肘部俯仰、肘部摆动、腕部摆动、腕部转动和夹钳开合7个动作,设计水深是7000米,最大伸长范围为1.9米,全臂展最大持重达65公斤。
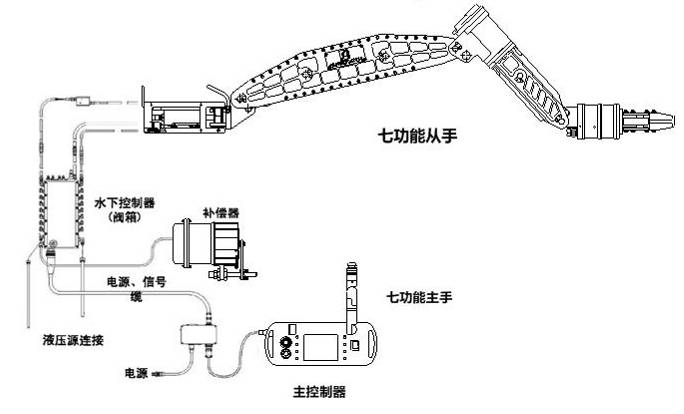
机械手系统构成
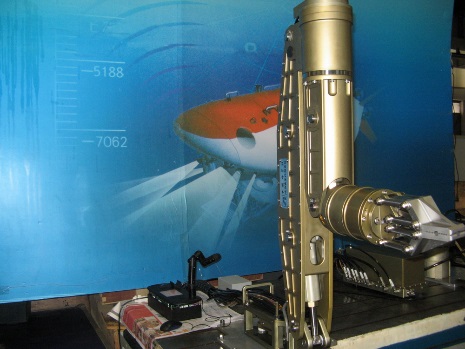
7功能主从伺服液压机械手
作为深海潜水器的首选作业工具,机械手可以独立完成水下布放、回收、拾取、机构触发等任务,并可与其他工具配合开展水下采样、测量等作业。同时,机械手末端可作为摄像机的支点,辅助获取多视角视频信息。
7功能主从伺服液压机械手于2013年12月完成了7000米整机压力试验。

压力试验场景

7000米压力舱外人员现场操作主手
2015年7月,7功能主从伺服液压机械手搭载“发现”号ROV,在1100米冷泉区完成了9次下潜,执行了样品采集、样品回收及采样器触发等操作,圆满地完成了科学考察任务,这是该机械手首次开展科学考察作业应用。


7功能主从伺服机械手搭载“发现”号ROV开展冷泉区作业应用
7功能机械手整机压力试验的成功完成以及实际应用,标志着我国自主研制的深海机械手已突破技术瓶颈,填补了国内7000米深海机械手的空白,为我国深海作业提供了装备支持。(图文素材由水下机器人研究室提供,综合办公室编辑整理)
附件下载:




